|
I am a Ph.D. student at School of Computer Science, Peking University, where I am honored to be advised by Prof. Yizhou Wang and co-advised by Prof. He Wang. I also collabrate closely with Prof. Li Yi and Prof. Tao Du. My research interests lie in Robotics and Embodied AI, focusing on contact-rich manipulation and world modeling. My research objective is to endow embodied agents working in complex real-world environments with Generalizability, Adaptability, Agility and Dexterity. |

|
|
|
- NEW [2025/7] Invited Talk at Sharpa and Prof. Chuan Wen's Lab at SJTU.
- [2024/12] Invited Talk at TechBeat.
|
|
| *: joint first author; † corresponding author(s) |
|
Zhikai Zhang*, Jun Guo*, Chao Chen, Jilong Wang, Chenghuai Lin, Yunrui Lian, Han Xue, Zhenrong Wang, Maoqi Liu, Jiangran Lyu, Huaping Liu, He Wang, Li Yi arXiv, 2025 project page / arXiv / code (OpenTrack) 
We present Any2Track, a foundational humanoid motion tracker to track any motions under any disturbances. |
|
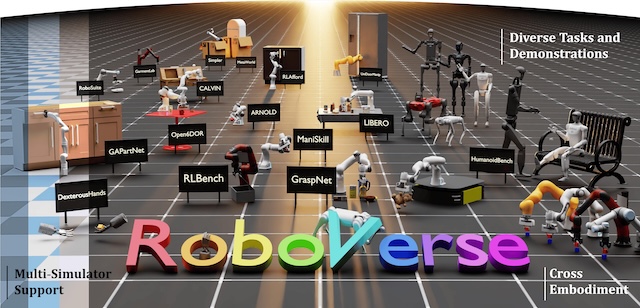
Haoran Geng, Feishi Wang, Songlin Wei, Yuyang Li, Bangjun Wang, Boshi An, Charlie Cheng, Haozhe Lou, Peihao Li, Yen-Jen Wang, Yutong Liang, Dylan Goetting, Chaoyi Xu, Haozhe Chen, Yuxi Qian, Yiran Geng, Jiageng Mao, Weikang Wan, Mingtong Zhang, Jiangran Lyu, Siheng Zhao, Jiazhao Zhang, Jialiang Zhang, Chengyang Zhao, Haoran Lu, Yufei Ding, Ran Gong, Yuran Wang, Yuxuan Kuang, Ruihai Wu, Baoxiong Jia, Carlo Sferrazza, Hao Dong, Siyuan Huang, Koushil Sreenath, Yue Wang, Jitendra Malik, Pieter Abbeel Robotics: Science and Systems (RSS), 2025 arXiv / project page / document / code 
|
|
Jiangran Lyu, Ziming Li, Xuesong Shi, Chaoyi Xu, Yizhou Wang†, He Wang† International Conference on Computer Vision (ICCV) 2025 arXiv / project page / code This work propose Dynamics-Adaptive World Action Model (DyWA) , a novel framework that enhances action learning by jointly predicting future states while adapting to dynamics variations based on historical trajectories. |

|
Yuxing Chen, Songlin Wei, Bowen Xiao, Jiangran Lyu, Jiayi Chen, Feng Zhu, He Wang† IEEE Robotics and Automation Letters (RAL) 2025 arXiv / project page This work explores robotic hanger insertion with a focus on diverse garments, leveraging a novel learning-based approach. |
|
Jiangran Lyu, Yuxing Chen, Tao Du, Feng Zhu, Huiquan Liu, Yizhou Wang†, He Wang† Conference on Robot Learning (CoRL), 2024 Data Generation for Robotics@RSS, 2024 arXiv / project page / code We propose the first learning-based robotic paper cutting system. Experimental results demonstrate that our method achives performance comparable to human operation with a single hand under the same conditions. |
|
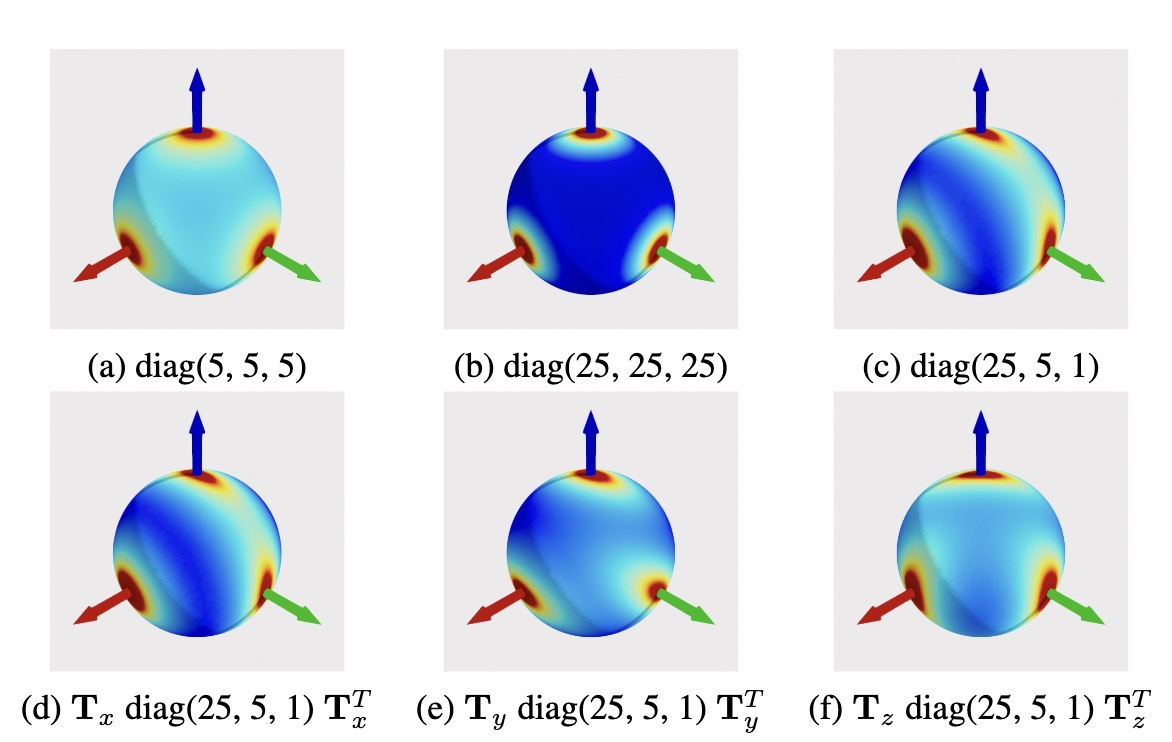
Yingda Yin*, Jiangran Lyu*, Yang Wang, Haoran Liu, He Wang†, Baoquan Chen†, IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2025 arXiv / project page / code We propose a novel Rotation Laplace distribution for probabilistic rotation estimation. Rotation Laplace distribution is robust to the disturbance of outliers and enforces much gradient to the low-error region, resulting in new state-of-the-art performance over both probabilistic and non-probabilistic baselines. |
|
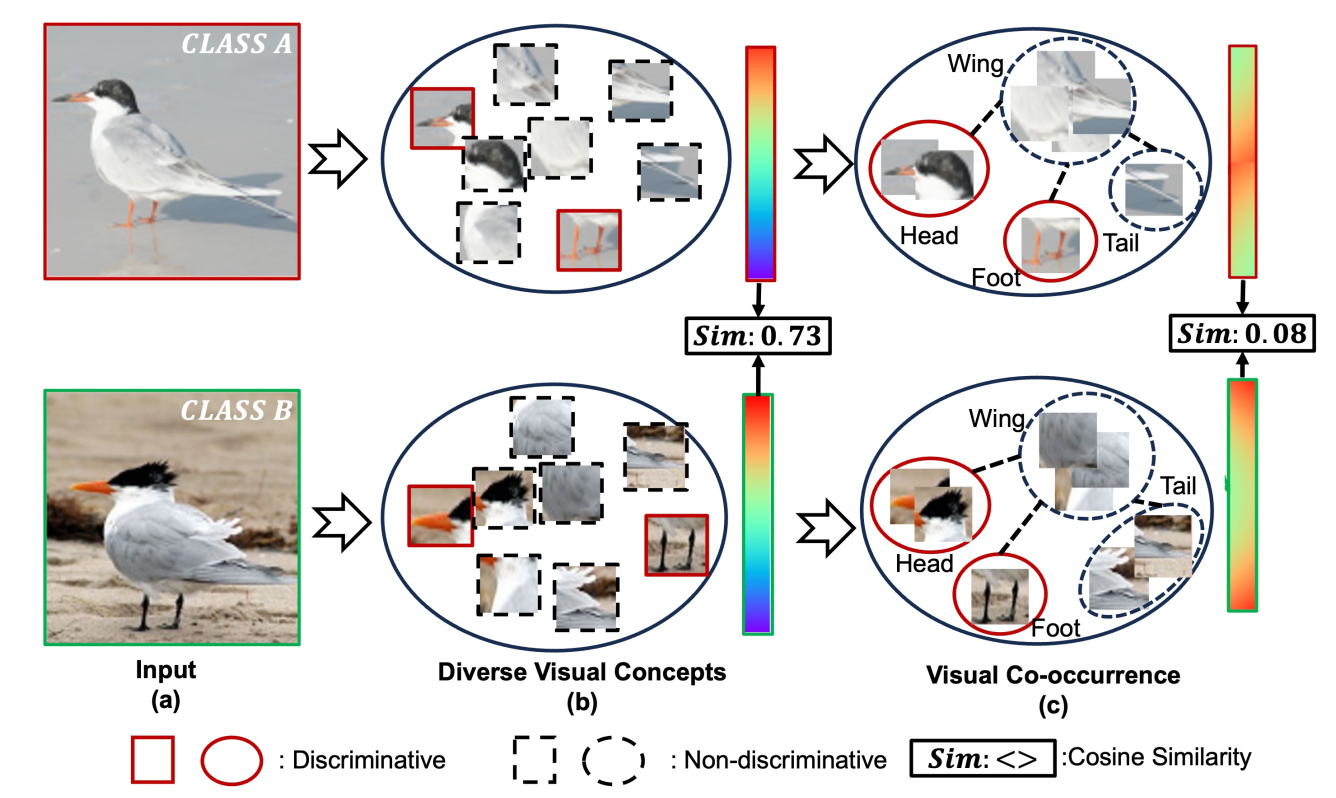
Shijie Wang, Haojie Li†, Jiangran Lyu, Qi Tian, IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), Under Review arXiv / project page / code We propose a novel Visual Co-occurrence Discovery Network (VCDN) to discover semantic co-occurring relationships within objects and facilitate the inference of their compositional structures. |
|
|
|
|
Ph.D. student in Computer Science Advisor: Prof. Yizhou Wang and Prof. He Wang 2023.9 - Present |
|
|
B.E. from School of Software 2019.9 - 2023.7 Grades: 94.10 (Rank 1/119) |
|
|
Website template courtesy of Jon Barron. |